课程简介
本节课学生了解田径竞技的基本方式,学习电机的运行原理和操控方法,了解光的反射原理,然后运用巡线传感器分别完成二路巡线、颜色传感器巡线和三路巡线编程,实现田径竞技巡线,并对比这三种巡线方式的差异。
课程目标
1. 知识与技能
①学生掌握万奇机器人左、右电机的运行原理和操控方法;
②学生能够分别运用 1 号和 5 号巡线传感器,3 号颜色巡线传感器,2 号、3 号和 4 号巡线传感器完成巡线任务;
③学生能够分析和对比三种巡线方式的差异,掌握多种解决问题的方式。
2. 过程与方法
①通过自主探究左、右轮电机的转动方式,记录并总结出相关规律,理解万奇机器人左、右轮电机的编程操控方法;
②通过教师讲解,学习影响反射光大小的因素及原理,理解巡线的基本原理,根据巡线传感器的位置及数量不同,分析三种不同的巡线方式。
③掌握三种巡线任务的方法,尝试分析、对比其差异,并进行总结。
3. 情感态度与价值观
①体验万奇机器人的新型运动方式(巡线),激发学生的探索欲望;
②在自主探索不同方式的巡线过程中,锻炼分析和解决问题的能力,并感受成功的喜悦。
教学重难点
1. 教学重点:
①学习影响反射光的因素及原理,理解万奇机器人巡线的基本原理;
②能够根据万奇机器人左、右轮电机的运动方式和巡线原理,完成三种巡线方式的程序编写。
2. 教学难点:
①能够理解万奇机器人巡线中不同情况下左、右轮电机的运动状态;
②能够理解三种巡线方式的原理。
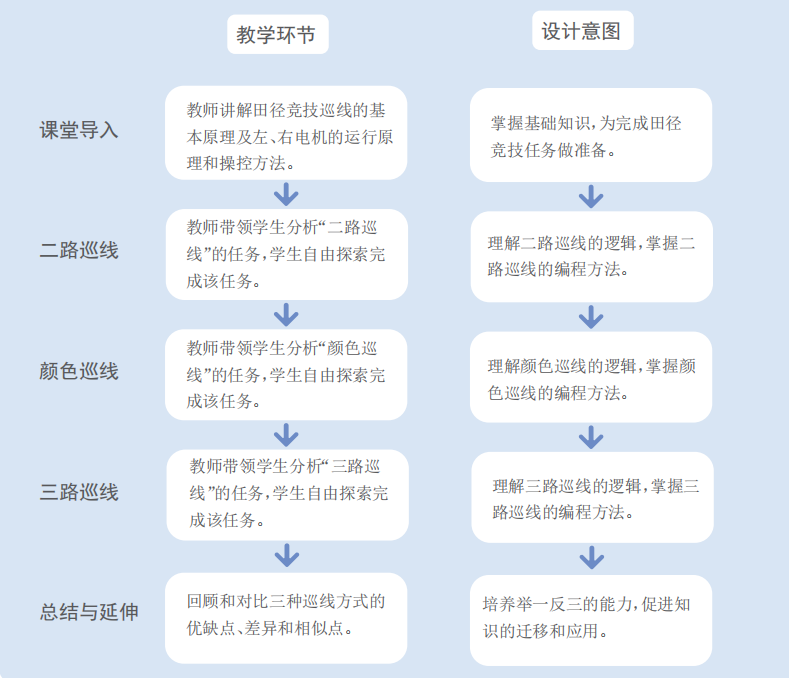
教学流程